NASA’s Mars 2020 Perseverance Rover was launched on board the United Launch Alliance's Atlas V rocket from Kennedy Space Centre in Florida on 30 July 2020. It will arrive at Mars on 18 February 2021.
Perseverance is the 5th rover sent by NASA which started with Spirit and Opportunity rovers that looked for water, the Curiosity rover looking for habitable environment and now Perseverance, looking for signs of life where it is most promising.

Landing Location
The rover will land on the Jezero crater, found at the north-west edge of the Isidis Planitia. This flat depression is located on the eastern hemisphere of Mars, between the Syrtis Major and Utopia Planitia. The Jezero crater shows a high potential of containing remnants of fossilised microbial life, if it was ever present on the planet, in comparison to more than 60 other candidate landing sites studied over the last five years.
The Isidis Planitia was formed billions of years ago after a large meteorite impacted Mars leaving a 1,325 km-wide crater. Smaller meteorites impacted this flat region (planitia) later forming multiple craters, one of them being the 45km-wide Jezero crater. On closer look, its features suggest that when there was water on Mars, a large river carved a canyon that opened into the crater which was then a lake and had a draining river exiting from the opposite rim. When water evaporated from the planet in progressively drier seasons at around 3.5 billion years ago, a sedimental delta was formed at the mouth of the inlet river, where minerals and perhaps microbial life would have slowly deposited, compacted and fossilised.
Spectrometric studies of images taken by NASA's Mars Reconnaissance Orbiter (MRO) and the High Resolution Stereo Camera aboard the European Space Agency (ESA) Mars Express orbiter, showed signs of minerals possibly altered by water in the past, containing sediments like clays (a combination of silica, alumina, magnesium and other minerals in water) and carbonates (inorganic salts of carbon compounds, sodium and calcium).

Jezero Crater: Images from the High Resolution Stereo Camera aboard the European Space Agency (ESA) Mars Express orbiter, colourised through spectrometry to depict variations in soil composition. NASA/JPL, 2020.

A Scientific Rover
The main purpose of the Perseverance Rover mission is astrobiological investigation. The collection of evidence in the search for bio-signatures to address the question of whether life ever existed on Mars. With this purpose, the rover is equipped with an array of instruments carefully packed into the rover’s body (3m long, 2.7m wide, 2.2m tall, weighting 1.025kg). Additional goals include: Characterisation of climate, geology and preparation for human exploration.
This is the first of a series of missions that will culminate in bringing Martian soil samples to Earth for analysis by 2031.
Instruments:
Perseverance has 7 primary instruments developed by international partner teams (country in parenthesis).
- Mastcam-Z (USA): These are high resolution zoomable panoramic stereo cameras for 3D video and still images, located on the Remote Sensing Mast or head or the rover. These cameras will help scientist study the geology by colour analysis and will help operators on Earth decide where to place the robotic arm to carry out its activities.
- Mars Environmental Dynamics Analyzer (MEDA) (Spain): This is a weather monitoring station with sensors near the mast and body to measure wind speed and direction, air pressure, humidity, temperature and solar radiation; it has a SkyCam that points at the sky to study clouds, dust and ice.
- Mars Oxygen ISRU Experiment (MOXIE) (USA): This instrument produces Oxygen (O2) from Martian Carbon Dioxide (CO2), or “In situ resource utilisation (ISRU)”. Oxygen is essential to ignite the fuel of future rockets launching from Mars. If this prototype works (a 17kg instrument produces 10g of O2 per hour), it will need to be expanded at least 200 times to produce oxygen for human missions and much more to generate the tens of metric tons of liquid oxygen required for a rocket launch.
- Planetary Instrument for X-ray Lithochemistry (PIXL) (USA): This X-ray spectrometer located in the turret of the robotic arm. The instrument emits a beam of X-ray at a nearby rock to determine its chemistry by analysing of how it glows or fluoresces. It can detect over 20 chemical elements with high accuracy in 10 seconds and has 6 motorised legs for precise positioning.
- Radar Imager for Mars’ Subsurface Experiment (RIMFAX) (Norway): This is a subsurface radar located on the underside of the body of the rover. This ground-penetrating radar has higher resolution then those mounted on orbiting spacecrafts and will help study qualities of the layers deposited on the Martian surface over time, including water ice.
- Scanning Habitable Environments with Raman & Luminescence for Organic Chemicals (SHERLOC) (USA): This is an ultraviolet spectrometer, located on the turret of the robotic arm. It flashes ultraviolet laser light over the surface and analyses the glow in search of organic molecules and minerals. It also has a camera to take microscopic images of rock and other surfaces. In addition, it features the Wide-Angle Topographic Sensor for Operations and eNgineering (WATSON) camera.
- SuperCam (USA, Spain & France): This is a laser micro-imager for distant analysis of rock, located on top of the mast. It shoots a pulsed laser that heats-up the rock instantly to 10,000 Celsius to create a Spark. The instrument analyses the plasma generated by the spark to determine the chemistry of the rock and with its microphone, it studies the popping sound produced by the spark to characterise its physical properties. It can reach samples up to 7m away from the rover.
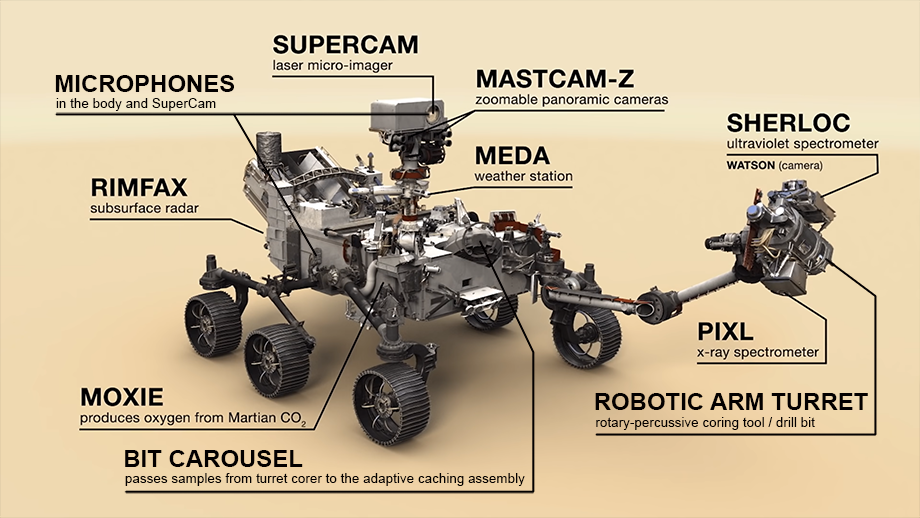
Instruments on the Perseverance Rover. NASA/JPL, 2020.
Robots:
The Robotic Arm: The arm extends up to 2m and has a 45kg turret that holds a rotary-percussive coring tool that operates with a hollow drill bit to collect core samples of rock and soil. The turret also carries other instruments that work close to the Martial surface.
The Bit Carousel: A carousel located in the front section of the rover’s body stores drill bits and empty tubes. It receives collected samples from the turret corer and passes them to the Adaptive Caching Assembly, for initial analysis and storage.
The Sample and Caching System on the rover is a collaboration of 3 robots:
- The robotic arm extends to hold the turret close to the samples, places some stabiliser legs and the coring tool perforates the rock or soil to acquire the sample. Then the arm retracts and rotates to pass the sample to the bit carousel.
- The bit carousel provides drill bits to the corer, receives samples after collection and transfers them for processing to the adaptive caching assembly.
- The adaptive caching assembly, located on the underside of the rover, has a sample-handling arm that transfers the sample from the carousel to other units for processes (measure volume, take images), sealing and storage. This arm will later transfer the sealed tubes to the Martian surface for retrieval by another mission.
Cameras:
The Perseverance rover has 3 groups of cameras: Descent, Engineering and Science.
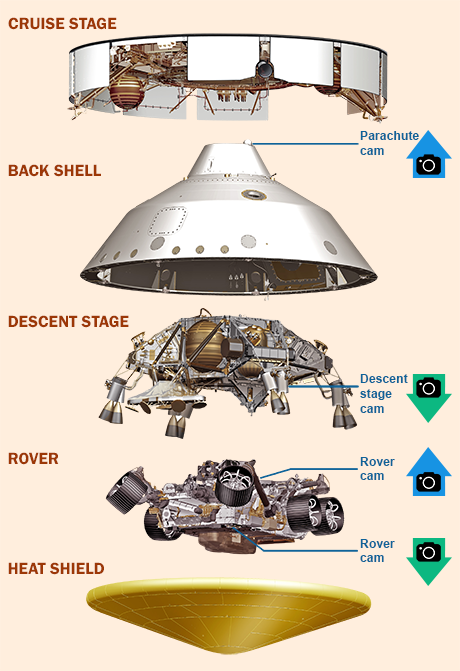
Descent cameras: These cameras will document the entry, descent and landing of the rover, providing a first-person view of those dramatic stages from strategic points on the spacecraft. Although not crucial for the mission, recording these rapid events will show the amount of dust produced and how parts of the rover move during a real landing, important learning points for future missions. Viewing that sequence will have a large public engagement value as was shown by the popularity of the computer-generated animation of the landing of the Curiosity rover in 2012, “7 minutes of terror”, which reached over 4 million views on streaming media channels.
- Parachute Up-looking camera located at the top of the Back Shell component will document deployment of the parachutes that slow down the fall after entry into the atmosphere.
- Descent Stage Down-looking camera located at the bottom of this stage will document the Skycrane manoeuvre that slowly lowers down the rover onto the ground.
- Rover Up-looking camera located on top of the rover will document the descent stage release and separation.
- Rover Down-looking camera located under the rover will document the Martian surface after the Heat Shield is released during landing. Those Terrain Relative Navigation (TRN) images will help adjust the trajectory of the rover to touch down on a safe location.
Engineering cameras: These cameras will help the rover move around the surface safely and record features to map the area in detail.
- Engineering cameras for driving, with high resolution (20 megapixels, 5410x3840px) and a variety of lenses will capture details of the surface to help navigators on Earth decide targets and movements of the robotic arm and its tools.
- Hazard avoidance cameras (HazCams) are also used for movement of the rover and the robotic arm. Four cameras in front and two at the rear will provide stereo-images for a 3-D view of Mars.
- Navigation cameras (Navcams) can take pictures for analysis of contour and distance with precision to plan movements of the rover in advance for autonomous movement. These two cameras, 42cm apart, are located on top of the Mast of the rover.
- Sample collection camera (CacheCam) is a single camera that looks into the sample tubes to record microscopic features of the samples as they are being collected to help keep track of each sample.
Science cameras: Five groups of cameras will assist researchers with the capture of visual evidence for scientific analysis.
- Mastcam-Z is a set of two cameras located on the Mast that can be Zoomed to obtain stereo-images at a variety of viewing angles and thus result in 3-D images of close and distant targets (2 magapixels, 1600x1200px).
- SuperCam is located on the Mast of the rover and combines an analysis camera and a laser gun that shoots pulses of laser at a precise point that can be smaller than 1 mm and as far as 7m from the rover. The spectrometers in the SuperCam then analyse the plasma released by the laser to determine chemical properties of the rock.
- Planetary Instrument for X-ray Lithochemistry (PIXL) is a camera mounted on the turret of the robotic arm that detects X-ray fluorescence to determine the chemistry of particles of less than 1mm in size, it contains a Micro-Context Camera to correlate with natural light images. It searches for chemicals left behind (“fingerprints”) by ancient microbial life.
- Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals (SHERLOCK) is a camera mounted on the turret of the robotic arm. It has a spectrometer, a laser and a camera to take extreme close-ups of material for the study of surface characteristics and signs of past microbial life.
- WATSON is a camera located on the turret of the robotic arm. It also collects images of fine textures of rocks and dust. As it is movable, it can be used to examine parts of the rover itself, e.g. monitoring dust accumulation. The rover has a calibration target printed on its front to standardise images and calibrate the instrument.

Perseverance rover cameras. NASA/JPL, 2020.
Microphones:
The microphones on the rover will pick up the sound of Mars starting from the descent and landing stages. Some are in the body, for engineering and public engagement, while others are part of the SuperCam and other instruments.
Power:
Perseverance can self-drive for 200 metres per day. It will travel to specific locations to carry-out its mission, to drill samples from the soil and process them. The two-year mission (one Martian year) requires constant and reliable energy and may demand up to 900 watts. This rover, like the previous one and other NASA interplanetary missions, converts heat into electricity using a Multi-Mission Radioisotope Thermoelectric Generator (MMRTG). The heat source is the natural radioactive decay of Plutonium-238, which will produce about 110 watts at the beginning of the mission and decline a little over the years. The generator will recharge two lithium-ion batteries used for daily operations and for large energy demands. The MMRTG is located at the rear of the rover and contains 4.8kg of plutonium, weighing 45kg. The two batteries next to it weigh 26kg with a capacity of 43amp/hr.
Experimental technologies:
Perseverance will carry two experimental artefacts for testing on Mars. This technology demonstration will provide valuable information for the development of future devices tailored to operate in that environment.
- MOXIE to test oxygen generation from carbon dioxide (see above).
- The Ingenuity Mars Helicopter will test powered flight. The helicopter will be bolted to the underside of the rover, protected by a shield to prevent dust contamination. This helicopter was designed by a collaboration of NASA’s Jet Propulsion Laboratory and Lockheed Martin Space. To compensate for the low gravity in Mars (about 1/3 that of Earth), and the extremely light atmosphere (1% as dense as Earth’s), the rotors will have to spin faster (2000-3000 revolutions/min) and the weight of the aircraft had to be reduced to a minimum (1.8kg) while maintaining its capability of autonomous flight. It will also have to keep itself warm to operate in the frigid conditions of Mars (the temperature at night can reach minus 90C). Ingenuity will take short 90-second flights during which it could go as high as 5 metres and as far as 50-70 metres to pre-determined locations, but it will have to travel on its own as remote piloting is out of the question. It will be deployed onto the surface two months into the mission and will have 30 Martian days to complete 5 flights of incremental difficulty.

Ingenuity Mars Helicopter. NASA/JPL, 2020.
Launch of Mars 2020 Perseverance Mission
The Perseverance rover was launched on board the United Launch Alliance's Atlas V rocket from Kennedy Space Centre in Florida on 30 July 2020 (NASA: 2hr 28min video with commentary and details about the mission).
The Perseverance rover was launched on board the United Launch Alliance's Atlas V rocket from Kennedy Space Centre in Florida on 30 July 2020.
REFERENCES
Links open in a new tab or window depending on your browser settings.
» NASA/JPL (2020) Summary of Mars 2020 Perseverance Mission. [Online video]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2020) Jazero crater. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» Caprarelly G (2015) Probing the Hidden Geology of Isidis Planitia (Mars) with Impact Craters. Geosciences, vol 5, issue 1, 30-44. [Online article]. Available
here. (Accessed: 10 Feb 2021).
» NASA/JPL (2020) Perseverance rover: Parts. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA/JPL (2020) Science instruments’ details. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA/JPL (2020) 23 Cameras. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2020) Cameras’ details. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2020) Mastcam-Z details. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2020) SuperCam details. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2020) PIXL details. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2020) SHERLOC details. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA/JPL (2020) Experimental technologies: MOXIE + Helicopter. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA/JPL (2020) Ingenuity Mars Helicopter. [Online video]. Available
here. (Accessed: 10 Feb 2021).
» NASA/JPL (2020) Ingenuity Mars Helicopter tests. [Online video]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2012) Curiosity’s 7 minutes of terror. [Online page]. Available
here. (Accessed: 10 Feb 2021).
» NASA (2012) 7 minutes of terror. [Online video]. Available
here. (Accessed: 10 Feb 2021).
» NASA/JPL (2020) Launch of Perseverance rover on 30 July 2020. [Online video]. Available
here. (Accessed: 10 Feb 2021).
Perseverance 3D model
Drag the model to rotate.
Mouse-wheel to zoom.